Nuovi risultati per il progetto COSMO, promosso da Next Generation Robotics nell’ambito del progetto BIT-INAIL sullo sviluppo di un sistema di sicurezza anticollisione per rendere più sicura la collaborazione tra uomo e robot nelle attività di manutenzione ferroviaria.
Lo scorso mese vi abbiamo introdotto il progetto COSMO, gli obiettivi di integrazione nel robot ARGO, e come rivoluzionare l’approccio alle ispezioni del sottocassa ferroviario, grazie all’impiego di sensori intelligenti, algoritmi di visione artificiale e tecnologie di robotica collaborativa. Adesso è il momento di presentare i risultati ottenuti sul progetto, frutto del lavoro di ricerca, sviluppo e sperimentazione del team di R&D e messi in campo grazie all’opportunità generata dal bando BIT-INAIL.
ARGO evolve: visione artificiale per la sicurezza attiva
Nel settore ferroviario, le attività di ispezione e manutenzione comportano rischi elevati per gli operatori, soprattutto durante l’accesso a spazi confinati come le fosse di ispezione. ARGO è stato progettato proprio per ridurre questa esposizione, svolgendo in autonomia le operazioni di raccolta dati visivi sotto i treni. Tuttavia l’impiego di robot mobili in ambienti condivisi con l’uomo richiede soluzioni di sicurezza avanzate, capaci non solo di rilevare la presenza umana, ma anche di comprenderne i movimenti e il livello di rischio.
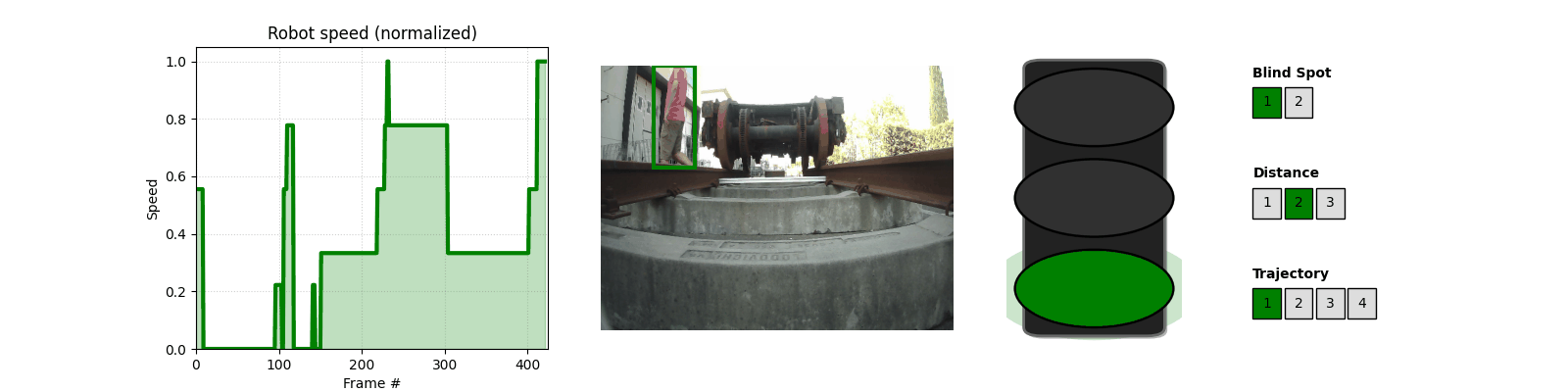
Per rispondere a questa esigenza Next Generation Robotics ha sviluppato COSMO, un algoritmo ottimizzato per lavorare in ambienti ferroviari reali che combina visione artificiale - anche con telecamere RGB a bassa risoluzione (640x480) - e dati provenienti da un sensore laser (Lidar) al fine di essere in grado di:
- rilevare con alta precisione la presenza umana nell’area di ispezione;
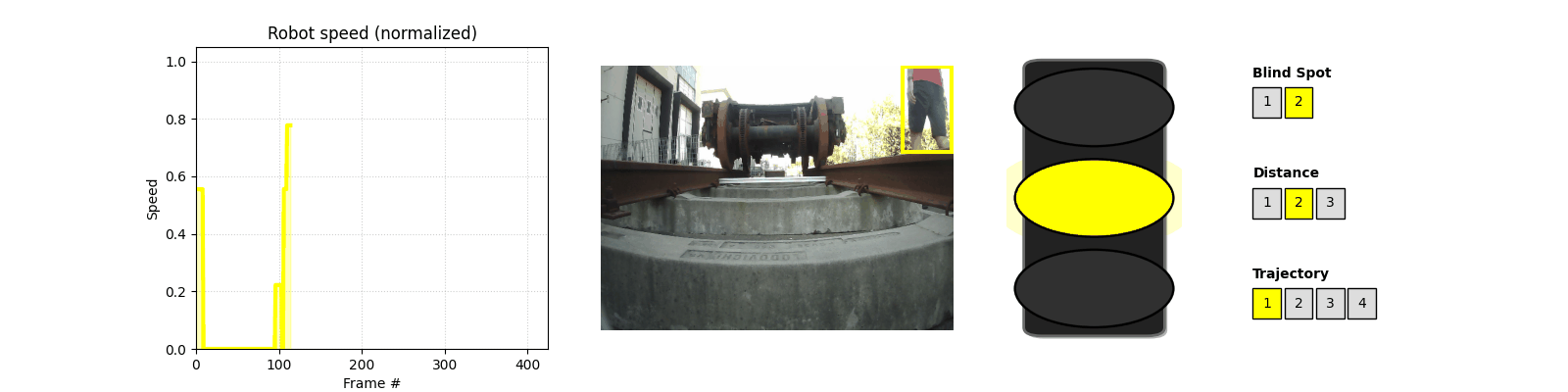
- classificare la traiettoria degli operatori (ad esempio se si stanno avvicinando o allontanando dai binari);
- stimare la distanza delle persone dal robot (vicina, media o lontana);
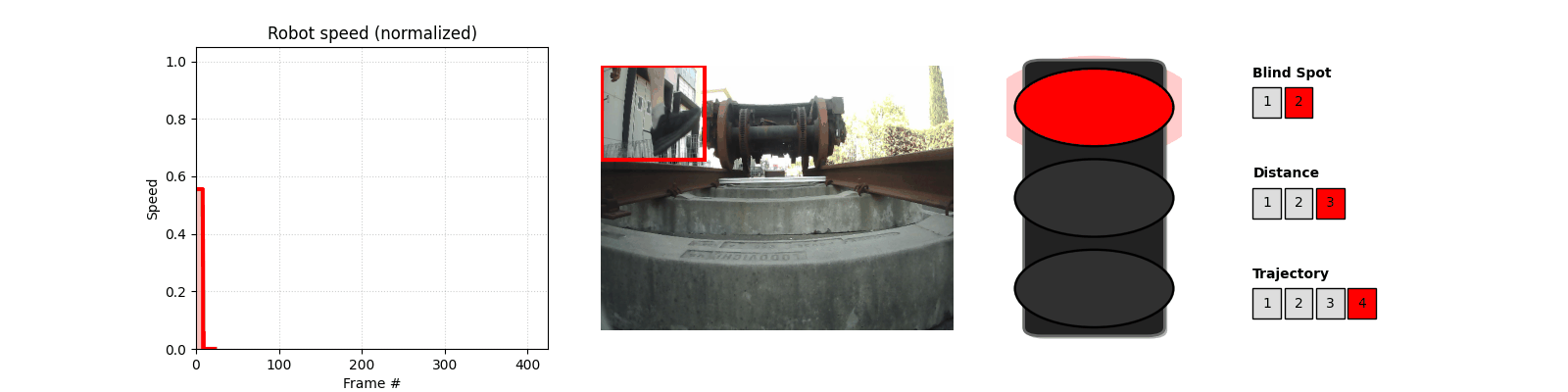
- rilevare eventuali presenze in zone cieche, come i bordi dell’inquadratura della telecamera, generando allarmi tempestivi.
Questo approccio consente al robot di adattare in tempo reale il proprio comportamento e attivare misure di prevenzione del rischio, come segnali acustici, luminosi o persino l’arresto d’emergenza, in linea con i requisiti della robotica collaborativa.
Dati, modelli e risultati: un sistema intelligente basato su IA
Lo sviluppo di COSMO è stato possibile grazie alla raccolta di un dataset di oltre 15.000 fotogrammi opportunamente classificati con più di 16.000 istanze umane etichettate, realizzato in un contesto di test realistico presso la sede di NGR, utilizzando veri binari e un carrello ferroviario reale. Questi dati hanno permesso di addestrare quattro modelli di intelligenza artificiale distinti, ognuno dedicato a una funzione chiave:
- Human Detection: per il rilevamento e tracciamento della presenza umana;
- Trajectory Classification: per l’analisi del movimento rispetto al robot;
- Distance Estimation: per la classificazione della distanza;
- Blind Spot Detection: per l’individuazione della presenza dell’operatore nelle zone critiche per la visibilità.
I risultati ottenuti nell’identificazione della presenza di persone o operatori nelle vicinanze dell’area in cui opera ARGO sono estremamente incoraggianti:
- accuratezza del rilevamento di persone: 99,3%
- accuratezza nell’identificazione della traiettoria delle persone rilevate: 97,7%
- stima della distanza delle persone rilevate dal robot: 98%
- rilevamento della presenza di persone in zone a bassa visibilità: 98,8%
Numeri che testimoniano l’affidabilità del sistema anche in condizioni operative complesse e in ambienti scarsamente strutturati, come quelli ferroviari.
COSMO: il cervello della sicurezza in movimento
Il modulo COSMO (COllision Sensing and MOnitoring) è il cuore tecnologico dell’intero progetto. COSMO combina un sensore LiDAR a scansione 3D con una telecamera RGB, per garantire una ridondanza funzionale: anche in caso di guasto o malfunzionamento di uno dei due componenti, il sistema è in grado di operare in sicurezza.
Questa architettura a doppio canale migliora l’affidabilità complessiva del robot e abilita una gestione proattiva del rischio: non ci si limita alla semplice rilevazione di ostacoli, ma si valuta attivamente la pericolosità della situazione in base al comportamento e alla posizione dell’operatore umano.
Un ecosistema di innovazione industriale 4.0
Il progetto si inserisce nel più ampio percorso di digitalizzazione della manutenzione ferroviaria, facendo leva su tecnologie abilitanti dell’Industria 4.0:
- robotica collaborativa per la coesistenza sicura uomo-macchina;
- visione artificiale e machine learning per il riconoscimento ambientale;
- controllo remoto e automazione per l’autonomia operativa;
- manutenzione predittiva per una gestione proattiva del materiale rotabile.
Il tutto è reso possibile grazie all’esperienza di Next Generation Robotics nello sviluppo di soluzioni robotiche per ambienti complessi, con competenze che spaziano dalla meccanica al software embedded, dalla progettazione all’analisi dati.
Verso una manutenzione ferroviaria più sicura e intelligente
L’integrazione del sistema COSMO rappresenta un salto qualitativo per la piattaforma ARGO e per la sua applicazione nel settore ferroviario. Significa avere un robot che vede, comprende e reagisce, migliorando la qualità delle ispezioni, riducendo i costi e soprattutto tutelando la salute dei lavoratori.
Il percorso non si ferma qui. NGR continuerà a sviluppare, testare e adattare queste tecnologie per nuove piattaforme e scenari, con l’obiettivo di estendere i benefici del sistema COSMO a tutte le piattaforme collaborative sviluppate.